

Введение
Техника точного позиционирования (РРР) стала наиболее значительной в приложениях высокоточного позиционирования в течение последних лет, так как она позволяет точно оценивать координаты ресивера и не требует наличия ближайшей базовой станции. РРР имеет другое интересное применение, как например синхронизация времени, характеристики ионосферы и тропосферы, или калибровка погрешности.
Международная GNSS служба (IGS) постоянно регулирует точную орбиту и временные расчеты для GPS и ГЛОНАСС с помощью плотной глобальной сети и нескольких содействующих аналитических центров. Используя эти продукты и моделирование точного наблюдения, точность статического абсолютного позиционирования может достигать 1 сантиметра в постобработке. В кинематических приложениях точность измерения достигает 10 сантиметров. Пользователи в режиме реального времени могут также получить доступ к орбите и синхронизации времени с помощью RTCM потоков, уровень точности которого достигает дециметров в режиме реального времени. Кроме того, существуют несколько коммерческих РРР сервисов по использованию GPS и Глонасс, например, такие как G2 FUGRO или Trimble’s RTX, который также поддерживает японский QZSS (Quasi-Zenith Satellite System).
Эта статья фокусируется на вкладе Galileo и BeiDou в РРР. Предпосылками этого является формирование точной спутниковой орбиты и времени для новых созвездий. Это осуществляется с помощью уравнивания по методу наименьших квадратов, используя данные наблюдений из IGS Multi-GNSS Experiment (MGEX), а также от собственной сети FUGRO, которая стала доступна для данного исследования.
Данные отслеживания
С развитием новых навигационных систем, в 2011 году IGS запустило Multi-GNSS эксперимент (MGEX), направленный на модернизацию существующей сети станций для поддержки новых созвездий. Большинство станций в кампании MGEX являются Galileo-адаптированными, и множество из них также отслеживает BeiDou. Станция Fugro управляет всемирной сетью базовых станций для поддержки своих услуг позиционирования в коммерческих целях. Что касается частотного плана для новых систем, BeiDou передает сигналы в трех диапазонах частоты: 1589,74 МГц (B1), 1207,14 МГц (В2) и 1268,52 МГц (В3), в то время как Galileo передает открытые сигналы в диапазонах E1 (1575.42 МГц), Е5а (1176,45 МГц), E5b (1207,14 МГц) и Е5а + B (1195.795 МГц), а также в дополнение для будущей коммерческой эксплуатации в диапазоне E6 (1278,75 МГц).
Все станции Fugro, оснащенные Trimble NetR9 ресиверами, обеспечивают Galileo и Beidou данными на всех частотах. Для того чтобы максимизировать доступность данных с существующими наблюдениями для последующего анализа были отобраны сигналы Galileo E1 и Е5а, а также BeiDou B1 и B2. Наблюдаемые сигналы обрабатываются с помощью не зависимой от ионосферы линейной комбинации, уравнений наблюдений которых детально рассмотрены в следующем разделе [1].
Уравнения наблюдений.
Орбита и расчет времени
Для этого исследования предложенные уравнения GPS наблюдений были расширены для размещения наблюдений мульти-GNSS, учитывая погрешность параметров между различными созвездиями. Результатами независимой от ионосферы линейной комбинации для каждой GNSS, для псевдодальности P и диапазона L, между станцией I и спутником J, являются:
 (1)
(1)
 (2)
(2)
 (3)
(3)
 (4)
(4)
 (5)
(5)
 (6)
(6)
 (7)
(7)
 (8)
(8)
где:
-  это геометрическое расстояние между станцией и спутником;
это геометрическое расстояние между станцией и спутником;
-  – влажная тропосферная задержка между станцией и спутником, где
– влажная тропосферная задержка между станцией и спутником, где  – тропосферная зенитная задержка и
– тропосферная зенитная задержка и  – топографическая ассоциированная функция зависимости высоты небесного тела над горизонтом;
– топографическая ассоциированная функция зависимости высоты небесного тела над горизонтом;
-  и
и  – компенсация ресивера и времени спутника соответственно;
– компенсация ресивера и времени спутника соответственно;
- c – скорость света;
-  – условия межсистемной погрешности GPS-Глонасс;
– условия межсистемной погрешности GPS-Глонасс;
-  и
и  – это межсистемные погрешности GPS-Galileo и GPS-BeiDou соответственно;
– это межсистемные погрешности GPS-Galileo и GPS-BeiDou соответственно;
-  – термин неопределенности между станцией и спутником, связанный с измерением фазы несущей частоты;
– термин неопределенности между станцией и спутником, связанный с измерением фазы несущей частоты;
-  и
и  – неучтенные эффекты, такие как тепловые шум и многолучевое распространение, для псевдодальности и фазы несущей частоты, соответственно. Следует отметить, что для измерений GNSS
– неучтенные эффекты, такие как тепловые шум и многолучевое распространение, для псевдодальности и фазы несущей частоты, соответственно. Следует отметить, что для измерений GNSS 

 .
.
Для оценки орбиты и времени был использован пакет программного обеспечения NAPEOS. Данное программное обеспечение было расширено с целью обработки Beidou на вершине существующих возможностей для GPS, ГЛОНАСС и Galileo.
Для того, чтобы получить априори орбиту для GPS и ГЛОНАСС возможно использование эфемерид трансляции. Для Galileo испытание эфемерида началось в марте 2014 года, но спутники еще не в лучшем состоянии, так как эти данные не всегда надежные. В настоящее время станции MGEX не предоставляют эфемерид для Beidou, По этим причинам, как для Galileo так и для Beidou используются двулинейные элементы (TLEs), с целью получить инициализацию априори орбиты. Точность этой априорной орбиты находится на уровне точности до километра. В первой стадии обработки выполняется оценка наименьших квадратов, используя только наблюдение псевдодальности, для того, чтобы улучшить TLE-производные орбиты и получить время априори спутника для Galileo и BeiDou. После этого шага, точность орбиты достигает одного метра, похоже на то, что получается при GPS и ГЛОНАСС с помощью трансляции эфемерид.
На втором этапе, используются наблюдения псевдодальности и фазы несущей, с целью получить пользу от точности измерений фазы несущей. Расчетными параметрами являются векторы состояния спутников, параметры давления солнечного излучения, тропосферные задержки из-за влажности, время спутника и станции, условия межсистемного смещения и неясности фазы несущей.
Наконец, для того, чтобы получить подходящие часы для РРР при выборке за 30 секунд, выполняется процесс конечного уплотнения времени. В этом заключительном шаге, оцениваются только станция и время спутника. Все остальные параметры остаются неизменными к предыдущим оценкам [2].
Моделирование для Galileo и Beidou. Будучи относительно новыми, системы BeiDou и Galileo имеют ряд ограничений моделирования по сравнению с более зрелыми системами, таких как GPS и Глонасс. Влияние этих ограничений будет рассмотрено в текущем разделе.
Стали доступны поправки точности фазового центра антенны GPS и ГЛОНАСС как части деятельности IGS через формат Antenna Exchange (ANTEX) для передающих и приемных антенн. Эти поправки точности пока не доступны ни для Galileo ни для BeiDou. Для спутниковых антенн MGEX project выпустила приблизительные значения для расстояния между спутниковым центром множества и фазового центра антенны. Это [0,2, 0, 0,6] м для Galileo и [0,6, 0, 1.1] м для BeiDou, XYZ с точки зрения зафиксированного тела спутника.
Ожидается, что эти значения имеют неопределенность около 10 см. Также ожидается, что на приемных антеннах смещение фазового центра и вариации зависимости от азимута и угла возвышения для частот Galileo и Beidou будет слегка отличаться (до нескольких сантиметров) от тех, которые используются для GPS, из-за разницы частот, используемых Galileo и Beidou. На момент написания статьи нет общедоступных калибровок для антенн, используемых в станциях MGEX. Для этого исследования были использованы GPS калибровки для Galileo и Beidou, которые представляют дополнительную неопределенность ниже 10 см.
Межсистемные погрешности
При обработке наблюдений мульти-GNSS должны быть приняты во внимание межсистемные погрешности. Для Глонасс эти смещения широко проанализированы в литературе и это исследование будет в основном сосредоточено на Galileo и Beidou. Как описано в разделе 3, одного параметра на станцию и систему (Galileo или BeiDou) достаточно для объяснения межсистемных погрешностей, как и все спутники используют один и тот же частотный носитель.
Кроме того, для того, чтобы определить исходное время, в процессе оценки орбиты и времени для каждого созвездия ко всем внутрисистемным погрешностям было применено условие со средним нулевым. Такой подход позволяет оценить относительные различия в межсистемных погрешностях между различными ресиверами в сети.
Ежедневные межсистемные погрешности для каждого созвездия изображены на рис. 1. Как правило, сильную зависимость ресивера можно наблюдать со всеми станциями с такой же моделью ресивера, показывающей подобные погрешности. Исключение было найдено в ресивере WTZZ (Javad Delta G3T), который показывает значительные различия по отношению к другим Javad ресиверам. Одно из возможных объяснений является то, что этот ресивер имеет отличную архитектуру, которая позволяет ему отслеживать также Beidou.
Оценка точного места позиционирования
Для точного места позиционирования мультисозвездий в NAPEOS был реализован новый алгоритм кинематического PPP, на основе последовательных наименьших квадратов и наблюдение уравнения, описанного в разделе 3.
Для того чтобы оценить эффект точного места позиционирования мульти-созвездия были отобраны некоторые базовые станции от сети MGEX. Это KOUR (Куру, Французская Гвиана), BRST (Брест, Франция), Nnor (Нью-Norcia, Австралия) и JFNG (Jiufeng, Китай). Все станции отслеживают GPS, ГЛОНАСС, Galileo и Beidou МEО. Кроме того, JFNG и Nnor также отслеживают BeiDou IGSO и GEO спутники, благодаря своему географическому местоположению [3].
Рисунок 2 показывает результаты кинематического РРР мульти-GNSS для станция Nnor 26 августа 2014 года. Квантили 95% погрешности определения местоположения составляют 1,74, 1,16 и 3,95 см, на востоке, севере и компонентов возвышения, соответственно, после удаления первых двух часов периода конвергенции. Для того, чтобы оценить пользу от мульти-GNSS PPP были получены ежедневные результаты кинематического РРР в течение месяца августа 2014 года для всех четырех станций в различных конфигурациях: только GPS, GPS + ГЛОНАСС, GPS + ГЛОНАСС + Galileo и GPS + ГЛОНАСС + Galileo + BeiDou. Средняя ежемесячная процентиля каждодневных 95% погрешностей положения обобщены в рис. 3.
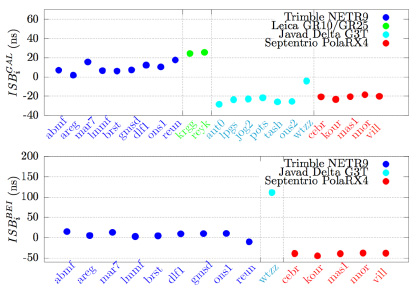
Рис. 1. Оценка межсистемных погрешностей для ряда ресиверов в сети MGEX,
Galileo (вверху) и Beidou (внизу)
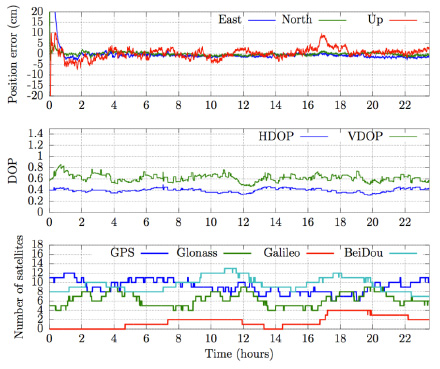
Рис. 2. Результаты кинематического PPP для станции Nnor на 26 августа 2014 г.
Далее Galileo улучшает вертикальную погрешность на 3,5% и дополнительное улучшение с Beidou на 6,7%. Вклад Galileo в верхней части GPS и Глонасс является относительно небольшим, вследствие небольшого количества доступных спутников, видимого со станции в ограниченный период времени в день. Вклад Beidou немного более важен, особенно в JFNG и Nnor, где IGSO и GEO также способствовуют разрешению позиционирования в этих местах. PPP мульти-созвездия особенно подходит в ситуациях с пониженной видимостью неба, где увеличенное количество спутников позволяет чтобы получить значительно высокую доступность и точность по сравнению с автономной GPS.
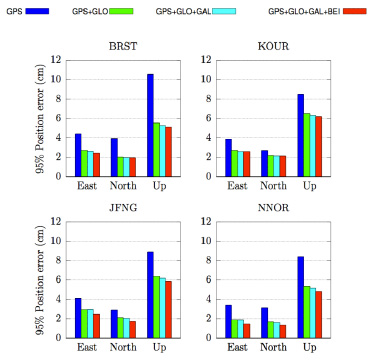
Рис. 3. Статистика кинематического позиционирования мульти-созвездий
для нескольких станции в MGEX
Для того чтобы смоделировать этот сценарий, двигатель PPP был запущен с несколькими отсечениями углов высоты от 0 (полная видимость неба) до 35 (снижение видимости неба) градусов. Результаты для станции Nnor изображены на рис. 4, с точки зрения точности позиционирования и средней ухудшения точности.
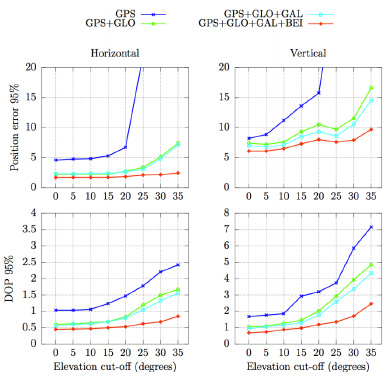
Рис. 4. Статика позиционирование и ухудшения точности (DOP),
для ряда станций и отсеченных углов, для станции Nnor 26 августа, 2014 г.
Можно наблюдать, как точность разрешения единственного GPS быстро деградирует с частичной видимостью неба. Разрешение мульти-GNSS ведет себя значительно лучше в этом состоянии, в частности со всеми четырьмя созвездиями, где точность до дециметра все же можно получить даже при сценарии в 35 градусного отсечения, в основном благодаря увеличению числа спутников видимых для Beidou на вершине GPS, ГЛОНАСС и Galileo. В этом случае, Galileo улучшает точность по вертикали на 12,6%, и BeiDou приносит дополнительное улучшение на 33,1% [4].
Выводы
GNSS landscape стремительно развивается, с добавлением возникающих спутниковых систем на вершине GPS и ГЛОНАСС. В этом исследовании результаты оценки точной орбиты были представлены Galileo и Beidou. Достигнутая точность орбиты, как правило, на дециметровом уровне для Galileo и BeiDou MEO и IGSO спутников. Оценка орбиты GEO спутников является сложной задачей из-за отсутствия изменения геометрии по сети опорной станции, и точность оценки достигает уровня 10 см. Спутниковое моделирование оставляет место для дальнейших исследований, с точки зрения корректировки фазового центра антенны и моделирования точной позиции.
Значительные различия межсистемных погрешностей были обнаружены между различными брендами ресиверов, которыми нельзя пренебречь для точных приложений. Были представлены уравнения расширенного наблюдения с учетом этих погрешностей, как в настройке сети, так и в разрешениях РРР. Кинематические результаты РРР мульти-GNSS показывают повышенную точность при использовании всех четырех спутниковых систем вместе. Однако, улучшение точности относительно невелико по сравнению с GPS + ГЛОНАСС в случае хорошей видимости на небе. Улучшение становится более существенным при условиях пониженной видимости, где увеличение числа спутников позволяет получить значительно более высокую точность и доступность для определения местоположения. Можно ожидать, что этот уровень производительности будет распространен по всему миру с дальнейшим развертыванием Galileo и Beidou в течение этого десятилетия.
Библиографическая ссылка
Сабденбекулы О., Рамазанова Б.К., Раскельдинов А.И. ОПРЕДЕЛЕНИЕ ОРБИТЫ И МЕСТА ПОЗИЦИОНИРОВАНИЯ ПРИ ПОМОЩИ GALILEO И BEIDOU // Международный журнал экспериментального образования. – 2015. – № 3-2. – С. 186-191;URL: https://expeducation.ru/ru/article/view?id=6777 (дата обращения: 20.04.2024).